
www.industrymiddleeast.com
14
'22
Written on Modified on
HMS Industrial Networks: واصل التقدم
تحديات الاتصالات والسلامة التي تواجه مصنعي الروبوتات المتحركة.

لكن لتعمل بفاعلية، تحتاج الروبوتات المتحركة لاتصال آمن وموثوق. وتلخص هذه المقالة تحديات الاتصال والسلامة الرئيسية التي يواجهها مصنعو الروبوتات المتحركة وتوفر طريقة سهلة للتغلب على هذه التحديات للحفاظ على استمرارية حركة الروبوتات المتحركة.
ما هي الروبوتات المتحركة؟
قبل أن نبدأ، لنحدد ما نعنيه بالروبوتات المتحركة.
تنقل الروبوتات المتحركة المواد من موقع لآخر وهي على نوعين، مركبات موجهة آلية (AGV) وروبوتات متحركة مستقلة (AMR). تستخدم المركبات الموجهة الآلية بنية تحتية توجيهية (أسلاك، عواكس، أو أشرطة مغناطيسية) لاتباع الطرق المحددة مسبقًا. وفي حال اعتراض شيء لمسارها، تتوقف المركبات الموجهة الآلية وتنتظر حتى يُزال هذا الشيء.
الروبوتات المتحركة المستقلة أكثر ديناميكية. فهي تتنقل عن طريق خرائط وتستخدم بيانات من كاميرات، مستشعرات مدمجة، أو ماسحات ليزر لاكتشاف الأشياء المحيطة واختيار الطريق الأكثر فاعلية. وفي حال اعتراض شيء لمسارها المقرر، تحدد طريق آخر. وبما أن الروبوتات المتحركة المستقلة لا تعتمد على بنية تحتية توجيهية، فإنها أسرع من حيث التركيب ويمكنها التكيف مع التغييرات اللوجستية.
ما هي تحديات الاتصال والسلامة التي تواجه مصنعي الروبوتات المتحركة؟
1- إنشاء اتصال لاسلكي
التحدي الأول الذي يواجه مصنعي الروبوتات المتحركة هو تحديد أنسب تقنية لاسلكية. وتتمثل النصيحة المعتادة في تحديد المتطلبات، تقييم المعايير، واختيار أفضل نظير. لسوء الحظ، لن يكون هذا ممكن على الدوام لمصنعي الروبوتات المتحركة لأنهم في الغالب لا يعرفون المكان الذي ستتواجد فيه أو التفاصيل الدقيقة للاستخدام المستهدف.
في بعض الأحيان سيكون اتصال البلوتوث مثالي لأنه يوفر اتصال مستقر غير مكتظ، في حين ستتطلب استخدامات أخرى اتصال خلوي آمن وعالي السرعة. الأمر الذي قد يكون مفيدًا لمصنعي الروبوتات المتحركة هو وجود تقنية اتصال شبكي يسهل تغييرها لتلبية متطلبات محددة.
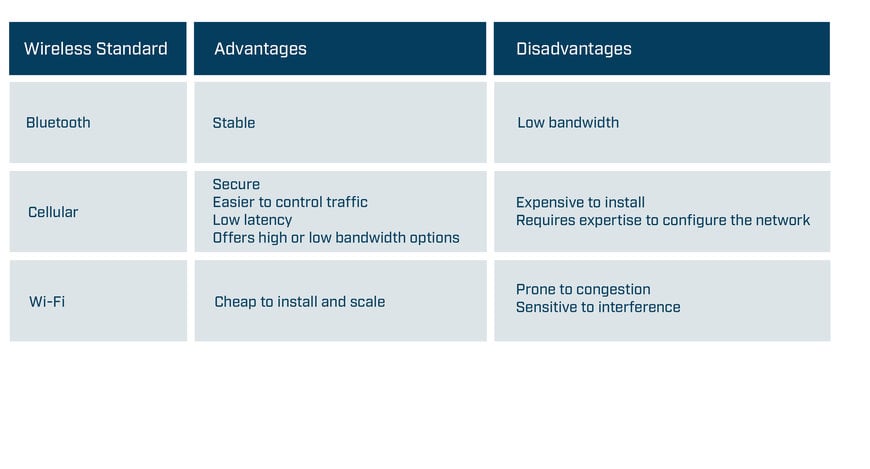
شكل 1.
المعيار اللاسلكي – مزايا وعيوب عالية المستوى
يتمثل التحدي الثاني في ضمان تنفيذ أعمال التركيب على النحو المخطط. فقبل تركيب حل لاسلكي، يجب إكمال الدراسة التنبؤية للموقع بناءً على رسومات المنشأة لضمان حصول الروبوتات المتحركة على تغطية إشارة كافية في جميع أنحاء الموقع. ويجب أن تحدد دراسة الموقع الموقع المثالي لنقاط الوصول، نوع الهوائي المناسب، زاوية الهوائي المثالية، وكيفية التخفيف من التداخل. وبعد التركيب، يجب استخدام أدوات كشف لاسلكية للتحقق من التصميم وضبط نقاط الوصول (AP) أو الهوائي حسب الاقتضاء.
2- توصيل الروبوتات المتحركة بالشبكات الصناعية
تحتاج الروبوتات المتحركة إلى الاتصال بوحدات التحكم في الموقع ذي الصلة بالرغم من استخدامهم في الغالب لبروتوكولات صناعية مختلفة. على سبيل المثال، قد تستخدم المركبات الموجهة الآلية بروتوكول CANopen في حين أن وحدة التحكم قد تستخدم بروتوكول PROFINET. بالإضافة إلى أن مصنعي الروبوتات المتحركة قد يرغبون في استخدام نفس طراز المركبة الموجهة الآلية في موقع مختلف حيث تستخدم وحدة التحكم شبكة صناعية أخرى، مثل EtherCAT.
يحتاج مصنوعو الروبوتات المتحركة أيضًا إلى التأكد من امتلاكها القدرات الكافية لمعالجة مقدار البيانات المطلوب. وسيتغير مقدار البيانات المطلوب بناءً على حجم ونوع المنشأة. فالمنشآت الكبيرة قد تستخدم بيانات أكثر لأن لوغارتمات التوجيه يجب أن تغطي منطقة أكبر، مركبات أكثر، وطرق محتملة أكثر. وتقوم أنظمة الملاحة، مثل الملاحة البصرية، بمعالجة الصور لذا يلزم قدرة أكبر على المعالجة مقارنةً بالمنشآت التي تستخدم أنظمة ملاحة أخرى مصل العواكس. نتيجة لذلك، يجب على مصنعي الروبوتات المتحركة إيجاد حل للتحديات التالية:
حاجتهم إلى تقنية ربط شبكي تدعم كل النواقل الميدانية الرئيسية وشبكات الإيثرنت الصناعية.
سهولة تغيير تقنية الربط الشبكي لتمكين الروبوتات المتحركة من الاتصال على نفس الشبكة الصناعية لوحدة التحكم دون تغيير تصميم الأجهزة.
حاجتهم إلى التأكد من امتلاك تقنية الربط الشبكي للإمكانيات والوظائف الكافية لمعالجة البيانات المطلوبة.
3- إنشاء نظام آمن
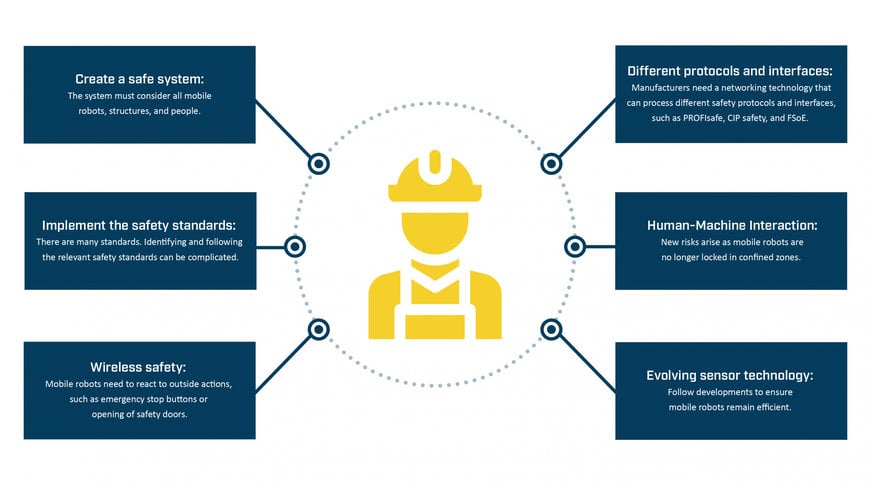
إنشاء نظام حيث يمكن للروبوتات المتحركة نقل المواد بأمان من الأمور الهامة إلى أنه يُعتبر من المهام الصعبة. ويجب على مصنعي الروبوتات المتحركة إنشاء نظام يراعي اختلاف جميع أنواعهأ، تركيباتها، والأشخاص المتواجدين في البيئة. ويجب أن يتأكدوا من تفاعل الروبوتات المتحركة مع الإجراءات الخارجية، مثل فتح شخص ما لباب السلامة أو الضغط على زر التوقف الطارئ، وأنه يمكن لحل الربط الشبكي معالجة بروتوكولات وواجهات السلامة المختلفة. ويجب أن يفكروا في أن الروبوتات المتحركة المستقلة تتحرك بحرية وأن يديروا خطر التصادم وفقًا لذلك. التقنية المستخدمة في المستشعرات دائمة التطور، ويجب على مصنعي الروبوتات المتحركة متابعة التطورات للتأكد من بقاء منتجاتهم آمنة قدر الإمكان.
شكل 2.
نظرة عامة على تحديات السلامة التي يواجهها مصنعو الروبوتات المتحركة
معايير السلامة
توفر معايير السلامة التوجيهات المتعلقة بتنفيذ مكونات ذات صلة بالسلامة، إعداد البيئة، والحفاظ على الآلات والمعدات.
بالرغم من أن الالتزام لمعايير السلامة المختلفة (ISO، DIN، IEC، ANSI، إلخ) طوعي في الغالب، إلا أن مصنعي الآلات في الاتحاد الأوروبي مطالبون قانونًا باتباع معايير السلامة المضمنة في التوجيهات الخاصة بالآلات. ودائمًا ما يُطبق التوجيه الخاص بالماكينات 2006/42/EC على مصنعي الروبوتات المتحركة، وفي بعض الاستخدامات قد يكون التوجيه 2014/30/EU أيضًا ذي صلة لأنه ينظم التوافق الكهرومغناطيسي للمعدات. يصف التوجيه الخاص بالآلات 2006/42/EC متطلبات تصميم وإنشاء الآلات الآمنة المطروحة في السوق الأوروبي. حيث لا يمكن للمصنعين إرفاق ملصق CE وتسليم الآلة إلى العملاء إلا إذا أمكنهم إثبات استيفائهم لمتطلبات التوجيه في إعلان التوافق.
بالرغم من أن معايير السلامة الأخرى غير إلزامية، إلا أن المصنعين لا يزالون مطالبين باتباعها لأنها تساعد على تلبية المتطلبات المضمنة في التوجيه الخاص بالآلات 2006/42/EC. على سبيل المثال، يمكن للمصنعين اتباع التوجيهات المضمنة في ISO 12100 لتقليل المخاطر المحددة إلى المخاطر المتبقية المقبولة. كما يمكنهم استخدام ISO 13849 أو IEC 62061 لإيجاد مستوى السلامة المطلوب لكل خطر والتأكد من تلبية الوظيفة المطابقة ذات الصلة بالسلامة للمتطلبات المحددة. تجدر الإشارة إلى أن مصنعي الروبوتات المتحركة يقررون كيفية تحقيق مستوى السلامة المعين. على سبيل المثال، يمكنهم تخفيض سرعة الروبوتات المتحركة لتقليل خطر التصادم وشدة الإصابات إلى مستوى مقبول. أو يمكنهم التأكد من عدم تشغيل الروبوتات المتحركة إلا في مناطق منفصلة حيث يُحظر دخول البشر (تُعرف بالمناطق المغلقة في ISO 3691-4).
يُعتبر تحديد المعايير الصحيحة وتنفيذ المتطلبات أفضل طريقة لتمكين الروبوتات المتحركة من خلق نظا آمن. إلا أنها عملية معقدة ومهدرة للوقت كما يشير هذا الملخص.
4- ضمان اتصال CAN الموثوق
شعبية الاتصال القائم على تقنية CAN آخذة في التزايد، فهو معيار موثوق وسهل التنفيذ منذ الثمانينات، ويرجع ذلك في الأساس إلى استخدام هذه التقنية في العديد من الصناعات المزدهرة، مثل التنقل الإلكتروني وأنظمة تخزين طاقة البطاريات (BESS). وتتسم تقنية CAN بالبساطة والكفاءة من حيث الطاقة والتكلفة. ويمكن لكل الأجهزة الموجودة على الشبكة الوصول إلى كل المعلومات، وهو معيار مفتوح، مما يعني أنه يمكن للمستخدمين تكييف وتوسيع الرسائل لتلبية احتياجاتهم.
بالنسبة لمصنعي الروبوتات المتحركة، أصبح إنشاء اتصال CAN أكثر أهمية لأنه يمكنهم من مراقبة بطارية أيون الليثيوم المستخدمة على نطاق واسع في أنظمة قيادة الروبوتات المتحركة، سواء في الأنظمة المعدلة أو في التركيبات الجديدة. ويجب على مصنعي الروبوتات المتحركة القيام بما يلي:
1- إنشاء اتصال موثوق بمعايير اتصال CAN أو CANopenلتمكينهم من التحقق من أجهزتهم، مثل مراقبة حالة البطارية والأداء.
2- حماية الأنظمة من التداخل الكهرومغناطيسي (EMI)، لأنه قد يتلف إلكترونيات النظام. ويُعتبر خطر التداخل المغناطيسي كبير في الأنظمة المعدلة لأن إضافة مكونات جديدة، مثل بطاريات بجوار كابل الاتصال، يؤدي إلى إنتاج اضطرابات كهرومغناطيسية عالية التردد.
5- الوصول إلى الروبوتات المتحركة عن بعد
القدرة على الوصول إلى نظام التحكم في الآلة عن بعد قد يمكن موردي أو مهندسي الروبوتات المتحركة من استكشاف الأعطال وإصلاحها وحل معظم المشاكل دون الانتقال إلى الموقع.
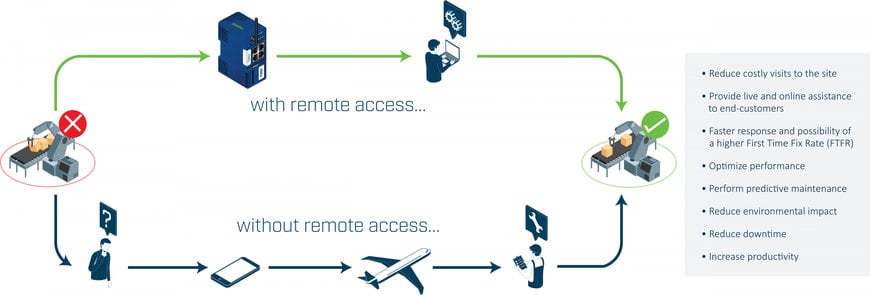
شكل 3.
مزايا الوصول عن بعد
يتمثل التحدي في إيجاد حل للوصول عن بعد يوازن بين احتياجات إدارة تكنولوجيا المعلومات (IT) واحتياجات المهندس أو المورد.
ترغب إدارة تكنولوجيا المعلومات في التأكد من بقاء الشبكة آمنة، موثوقة، والحفاظ على سلامتها. ونتيجة لذلك، يجب أن يتضمن حل الوصول عن بعد الإجراءات الأمنية التالية:
استخدام اتصالات صادرة بدلاً من اتصالات واردة لإبقاء التأثيرات التي تصيب جدار الحماية عند حدها الأدنى.
فصل المرور ذي الصلة عن بقية الشبكة.
تشفير وحماية كل المرور لضمان سريته وسلامته.
التأكد من عمل الموردين بما يتفق مع معايير الأمن ذات الصلة مثل ISO 27001 أو اعتماد عملهم وفقًا لهذه المعايير.
التأكد من إتمام الموردين للتدقيقات الأمنية المنتظمة.
يرغب المهندس أو المورد في نظام سهل الاستخدام وموثوق. ويجب أن يسهل على المستخدمين الاتصال بالروبوتات المتحركة والوصول إلى المعلومات المطلوبة. إذا كان من الممكن تغيير المنشأة، فيجب أن يسهل زيادة عدد الروبوتات حسب الاقتضاء. وإذا كانت الروبوتات المتحركة في بلد مختلف عن بلد الموردين أو المهندسين، فيجب أن تمتلك البنية التحتية للربط الشبكي التغطية والتكرار الكافيين لضمان التوافر في جميع أنحاء العالم.
الخاتمة
كما رأينا، يجب على مصنعي الروبوتات المتحركة إيجاد حل للعديد من تحديات الاتصال والسلامة. حيث يجب عليهم إنشاء اتصال لاسلكي، غرسال البيانات عبر شبكات مختلفة، ضمان السلامة، الاتصال بأنظمة CAN، والوصول الآمن إلى الروبوتات عن بعد. ولجعل الأمر أكثر تعقيدًا، يجب إعادة تقييم كل منشأة وتكييفها لتلبية متطلبات الموقع.
أفضل الممارسات لتنفيذ اتصال الروبوتات المتحركة
نادرًا ما يكون مصنعو الروبوتات المتحركة خبراء في الاتصال أو السلامة. وبالتالي، قد يجدون تجربة وتطوير تقنية الاتصال المطلوبة في الداخل مهدرة للوقت ومكلفة. وتجدر الإشارة إلى أن استخدام حلول اتصال خارجية مُصممة للغرض لن يوجد حلاً لتحديات الاتصال فحسب، وإنما سيعمل على توفير مزايا أخرى.
تتسم حلول الاتصال الحديثة بتصميم معياري يمكن مصنعي الروبوتات المتحركة من حذف منتج ربط شبكي واحد مُصمم لمعيار أو بروتوكول واحد واستبداله بمنتج مُصمم لمعيار أو بروتوكول مختلف دون التاثير على أي جزء آخر بالآلة. على سبيل المثال، قد يكون البلوتوث أنسب معيار لاسلكي في إحدى المنشآت، في حين يوفر الواي فاي تغطية أفضل في منشأة أخرى. وبالمثل، قد يستخدم أحد المواقع بروتوكولات PROFINET وPROFIsafe، في حين أن موقع آخر قد يستخدم بروتوكولات صناعية وأمنية مختلفة. في كلا السيناريوهين، يمكن لمصنعي الروبوتات المتحركة استخدام منتجات الاتصال لتغيير تقنية الربط الشبكي لتلبية المتطلبات المحلية دون إجراء أي تغييرات على تصميم الأجهزة.
المؤلفون:
مارك كروسلي، دانيل هيانزلر، فريدريك براينولف، توماس كارلسون
HMS Networks
تُعتبر HMS Networks خبير في الاتصالات الصناعية مقرها السويد، وتعمل على توفير العديد من الحلول لاتصالات المركبات الموجهة الآلية. اقرأ المزيد على www.hms-networks.com/agv.
